There is a gap between communication within collaborative work and the modern, high tech world we live in. Brainstorming and idea sharing is an essential part of daily life in companies and in schools, and there is no cheap, flexible solution that address this.
In schools, students can be grouped to work on a project but don’t have the resources to do so efficiently. Also, group discussion and mind mapping in class can be a struggle. Smaller groups are unable to present their ideas due to the limitations of pen-and-paper brainstorming, due to the reduction in budget for education.
Currently smartboards or interactive boards are extremely expensive and on average retail at prices above $3000 causing many users to be disincentivized from busing such products, not only this but it leaves a large portion of the worlds market untapped especially in 2nd and 3rd world countries. Using new technology almost 80% of the current whiteboard’s technology can be replicated for a fraction of the cost.
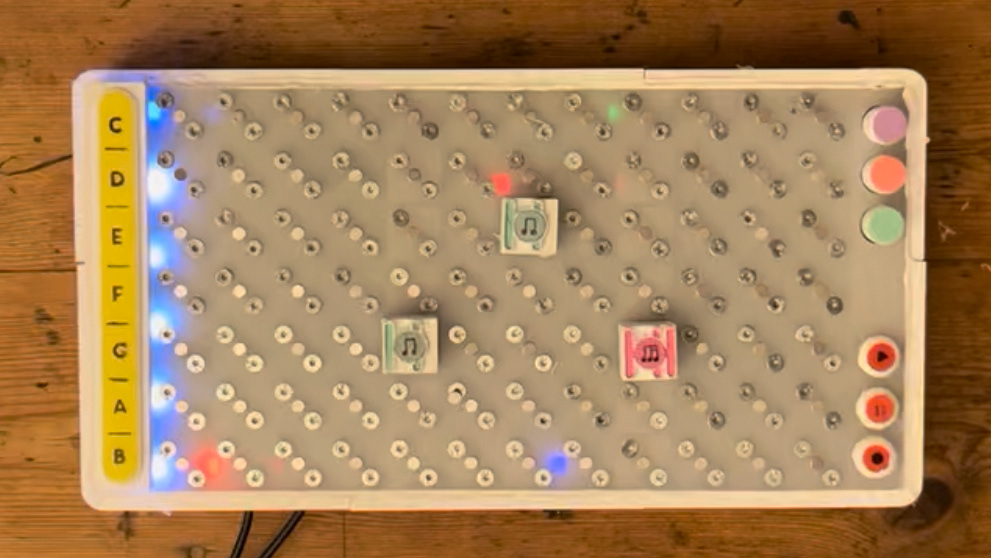
The idea is to have a infrared sensor with Bluetooth chip which will be used to send signals to the computer. The infrared sensor will sense when the infrared pen is turned on and will record the coordinate of the point this will then be sent to the computer via bluetooth where it will be plotted on the application for the user to see.
The sensor will know the boundaries on the grid as when the application will be loaded up the user will be asked to put the pointer on all four corners. This will allow the computer to and sensor to create a grid based on the four extremes, using homography algorithms and equations as well.
The infrared pen will consist of a battery, push-switch and infrared emitting diode. When the button is press this will complete the circuit turning on the diode and allowing the infrared sensor to track its coordinates.
The infrared sensors will be able to track 4 pens at once this will allow multiple to write on the board at once.
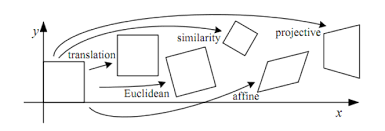
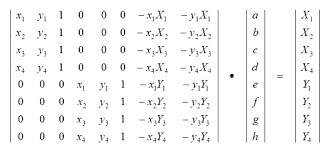
Due to the use of two co-ordinate systems from the projector and camera, matrix tomography was used to manipulate the camera co-ordinates into the projector co-ordinates; accounting for translation, Euclidean, similarity, projective, affine.
The mathematic functions were developed from the ground up, programmed and optimised for speed, solving homography matrixes faster then pre-designed functions developed in libraries such as OpenCV.